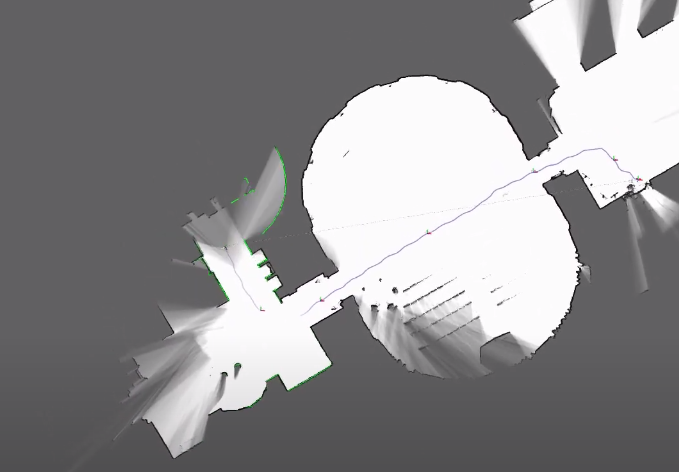
자율주행 로봇의 목적 목적지가 주어졌을 때, 로봇이 스스로 해당 목적지를 찾아가는 것 자율주행에 필요한 사항 1. 지도 2. 자신의 위치 3. 경로 탐색(Path-Planning) 기능 4. 충돌 회피 기능 목적지가 설정되기 위해서는 가장 먼저 지도가 필요하다. 목적지를 특정화하기 위해서는 지도가 필요하며 자신의 위치도 알아야 한다. 필요한 지도를 생성하기 위해 로봇이 스스로 이동하며 지도를 그린다. 지도를 생성한 후, 지도와 센서 데이터를 매칭 시켜서 자신의 위치를 파악한다. 이런한 기술을 SALM이라 한다. SLAM (Simulataneous Localization And Mapping)은 간단히 맵은 작성하고 위치를 추정하는 기능이라 할수 있다. 지도 생성 시, 동적 장애물은 지도에 작성되지 않으며..