자율주행 로봇의 목적
목적지가 주어졌을 때, 로봇이 스스로 해당 목적지를 찾아가는 것
자율주행에 필요한 사항
1. 지도
2. 자신의 위치
3. 경로 탐색(Path-Planning) 기능
4. 충돌 회피 기능
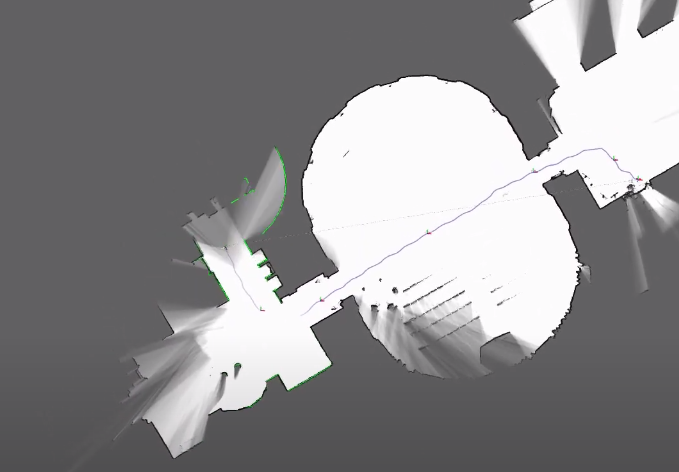
목적지가 설정되기 위해서는 가장 먼저 지도가 필요하다. 목적지를 특정화하기 위해서는 지도가 필요하며 자신의 위치도 알아야 한다. 필요한 지도를 생성하기 위해 로봇이 스스로 이동하며 지도를 그린다. 지도를 생성한 후, 지도와 센서 데이터를 매칭 시켜서 자신의 위치를 파악한다. 이런한 기술을 SALM이라 한다. SLAM (Simulataneous Localization And Mapping)은 간단히 맵은 작성하고 위치를 추정하는 기능이라 할수 있다.
지도 생성 시, 동적 장애물은 지도에 작성되지 않으며, 비동적 장애물은 지도에 작성된다. 비동적 장애물로 인식되어 지도에 작성되더라도 동적 장애물로 판단되는 순간 지도에서 지워진다.
"SLAM 기능을 수행하기 위해 필요한 2가지 정보가 필요하다."
1. 자신의 이동정보를 알 수 있는 Odometry
2. 주변 지형지물과의 거리 정보
눈을 감고 앞으로 10보, 뒤로 10보를 이동하였을 때, 원점에 도달하기는 쉽지 않다. 구동부(보폭), 방향 및 외부 요인에 의한 오차가 누적되기 때문이다. 하지만 눈을 뜨고 같은 행동을 하면 원점에 도달할 수 있다. 눈을 통해 주변정보를 피드백 받아 보폭 및 방향을 제어하기 때문이다.
여기서 "10보 이동"이라는 정보는 Odometry정보이며, 주변정보는 눈을 통해 획득한다. 로봇의 경우 LiDAR, Depth camera, 초음파 센서 등을 통해 주변정보를 획득할 수 있다.

로봇 센서 구성 및 용도 (예시)
"3D LiDAR sensor"
16채널의 3D LiDAR sensor
360deg 데이터가 세로로 16SET(16층)로 획득 가능한 센서
"RGBD Camera (R G B depth)"
색깔, 분포, 크기, 위치 및 모양 정보 획득
"2D LiDAR sensor"
해당 로봇에는 20만원 수준의 저렴한 센서가 장착됨
(보통은 100만원 수준은 한다 함)
전방에 카메라가 인식 못하는 구간을 보조하는 역할
"초음파 센서"
광학센서는 유리로 된 장애물 인식에 오류가 있을 수 있음
이를 보완하는 센서
프로세서는 일반 PC를 사용했다 한다.
'💼 일' 카테고리의 다른 글
| LiDAR (Light Detection And Ranging) 센서란? (0) | 2022.07.20 |
|---|---|
| 카메라 및 렌즈 용어 정리 :: 센서 사이즈, 해상도, 왜곡, FOV, MOD (1) | 2022.07.12 |
| OEM, ODM, CMO 용어 설명 (1) | 2022.06.20 |
| 관성 모멘트 개념 잡기, 느낌 이해 (0) | 2022.05.27 |
| 물류로봇 AGV와 AMR의 차이점 (0) | 2022.04.27 |