
주행 저항이란?
= 구름 저항 + 공기 저항 + 가속 저항 + 등판 저항
1) 구름저항
차량이 노면 위를 굴러 이동할 때 받는 저항의 총합
① 회전하는 타이어의 변형에 드는 일에 의한 저항
② 차량 각부의 마찰
③ 노면을 변형시키는 일에 의한 저항
등으로 구성
구름저항의 대부분은 "회전하는 타이어의 변형에 드는 일에 의한 저항"에 의해 발생한다.
노면이 연약하거나 수막현상이 있을 때는 노면을 변형시키는 저항을 고려해야 하나 일반적으로 무시해도 관계없다.
차량 각부의 마찰에 의한 저항은 동력 전달 효율로 고려되므로 무시해도 관계없다.
"참조 : 도로조건에 따른 구름저항계수"
| 타이어 종류 | 노면의 상태 | 구름 저항 계수(μ_R) |
| 승용차용 공기 타이어 | 콘크리트 (건조) | 0.01 ~ 0.02 |
| 콘크리트 (젖음) | 0.02 ~ 0.03 | |
| 아스팔트 (건조) | 0.01 ~ 0.02 | |
| 아스팔트 (젖음) | 0.02 ~ 0.03 | |
| 자갈+타르 (건조) | 0.02 ~ 0.03 | |
| 비포장도로 (딱딱함) | 0.05 | |
| 농로, 모래길 | 0.1 ~ 0.35 | |
| 상용차용 공기 타이어 | 콘크리트, 아스팔트 (건조) | 0.006 ~ 0.01 |
| 기차용 금속 차륜 | 철로 (건조) | 0.001 ~ 0.002 |
2) 공기저항
진행방향과 반대방향으로 작용하며
① 공기밀도
② 앞 투영 단면적
③ 주행속도
④ 차량의 형상
등에 의해 결정된다.
"참조 : 형상에 따른 공기 저항 계수"
3) 가속 저항
물체의 운동 속도를 상승시키려면 그 물체의 관성력을 극복해야 한다. 따라서 가속저항을 관성저항이라고도 한다. 관성저항은
① '직진 관성저항'
② 차륜 등의 동력전달계의 회전에 대한 '회전 관성저항'
이 있으며 결과적으로 차량의 질량이 증가한 것과 같은 현상으로 나타난다.

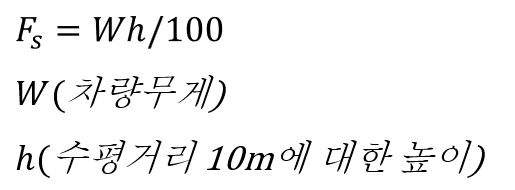
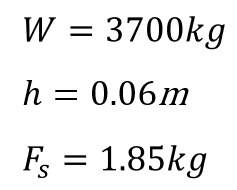
4) 등판저항
경가면을 주행할 때 발생하는 중력에 대한 저항력
등판 경사도가 크지 않을 경우 수평거리(100m)에 대한 높이와의 비인 백분율로 대체하면 아래와 같다.
5) 전주행저항(구동력)
주행 시 운동에 대항하여 발생하는 전주행저항은 개별 저항의 합으로 나타나며
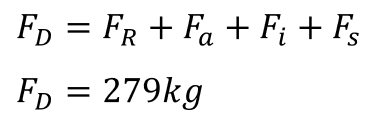
차량의 속도는 1m/s, 가속도는 0.2m/s^2일 때 구동력은 279kg이며 구동륜의 슬립 손실을 무시하면 구동마력(출력) 및 구동부의 회전력(토크)는 다음과 같다.

구동 휠이 2개라면 구동부 하나에 필요한 최소 출력은 1.37kW이다.
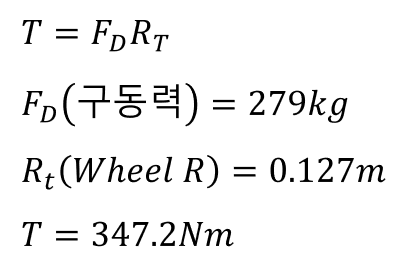
구동 휠이 2개라면 구동부 하나에 필요한 최소 토크는 174Nm이다.
'💼 일' 카테고리의 다른 글
| 토크란? 기동토크(시동토크), 정동토크(최대토크), 정격토크 (0) | 2022.08.24 |
|---|---|
| IMU(Inertial Measurement Unit) 센서란? (0) | 2022.08.23 |
| ASPICE(Automoive SPICE)란? (0) | 2022.07.22 |
| LiDAR (Light Detection And Ranging) 센서란? (0) | 2022.07.20 |
| 카메라 및 렌즈 용어 정리 :: 센서 사이즈, 해상도, 왜곡, FOV, MOD (1) | 2022.07.12 |